
The Eurobot competition
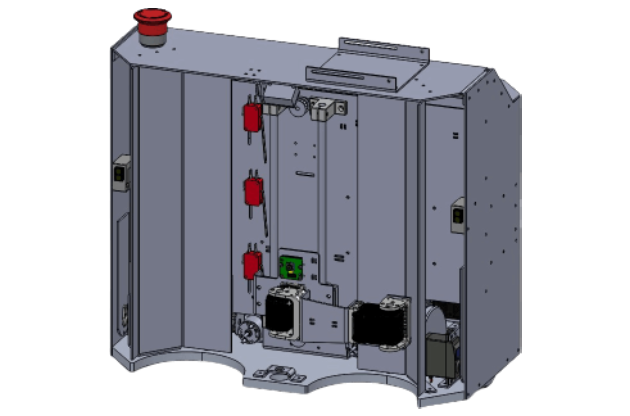
3D CAD Model of the robot
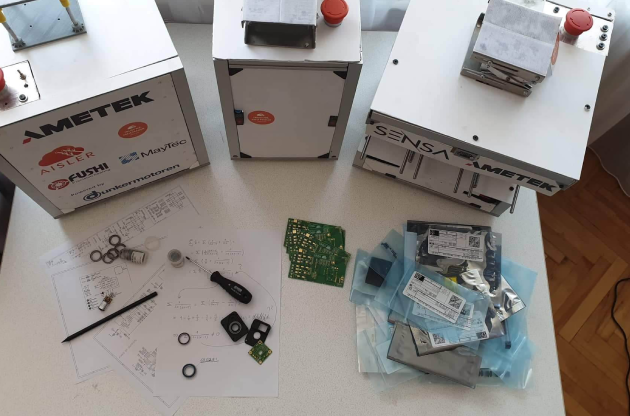
View of the three robots
Top view of the robot

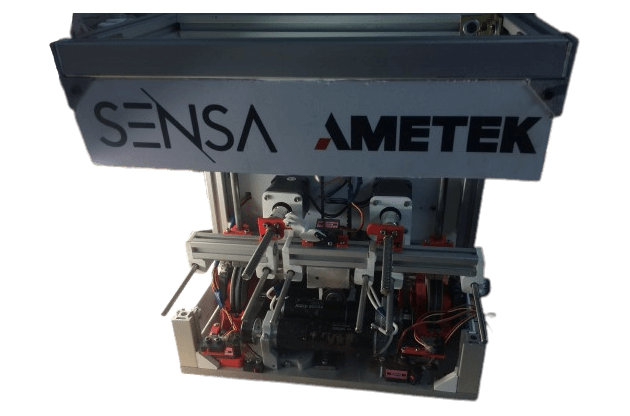
Front view of the robot

Side view of the robot
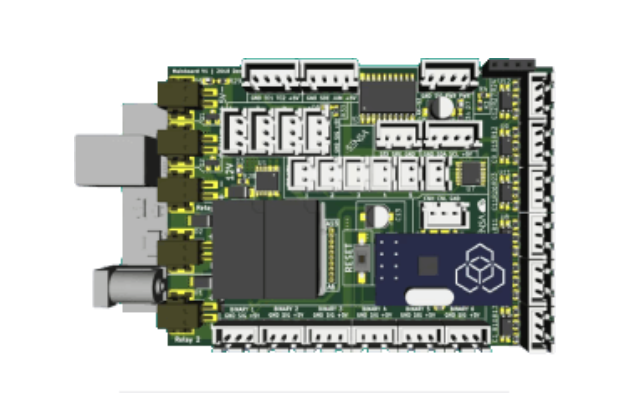
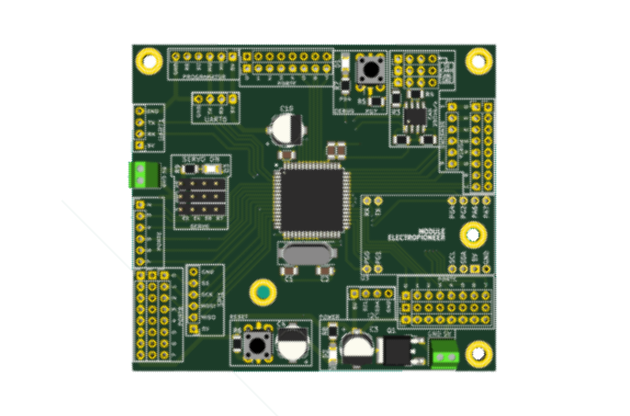
Main board
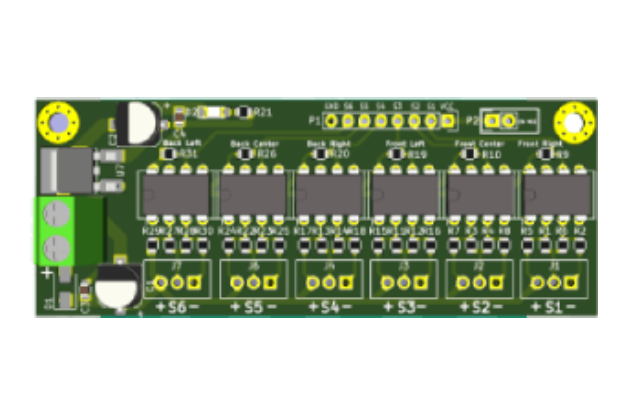
Optocoupler board
Older AT90CAN128 Main board
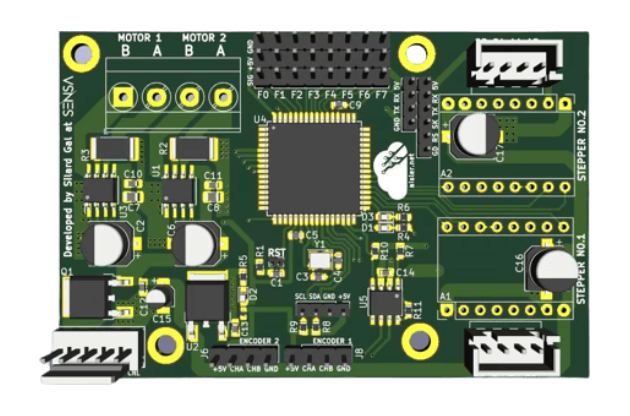
Motor controller
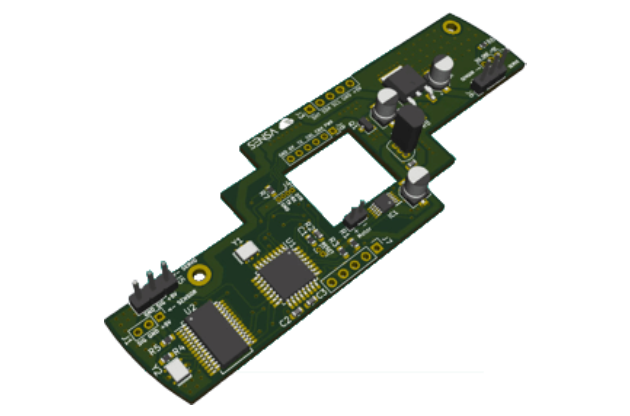
Lidar board

Firmware
Overview
Robotics has been a passion of mine since I started working with electronics and programming. I was fortunate enough to be a part of Elektropioneer, my robotics team, for six years: four as a member and two as a mentor. Our team's primary goal was to participate in the Eurobot competition, where we were the only high school team competing against colleges.Throughout my time on the team, I was exposed to and worked on every aspect of the robot, including electronics, software, mechanical, and tactical. As I progressed, I became the leader for the electronics and firmware side of the robot. Our team primarily used Atmel and PIC-based MCUs that communicated with each other through CAN Bus.
We divided the robots into multiple parts, including the main board, actuator board, sensor board, and odometry board. The main board acted as the brains of the robot and issued commands to every module through CAN Bus. The actuator board housed relays, MOSFETs, stepper drivers, and DC motor drivers to control every actuator the robot had. The sensor board was optocoupler-based and converted our 12V sensor signals to the appropriate voltages. The odometry board was the most complex, as it had to read the encoders and determine the speed of the motors. It also housed all the software that made the robot move on the table, including PID control.
Every year, we rebuilt the electronics, software, and mechanical aspects of the robot to comply with the new competition rules.
Aside from the technical aspect of robotics, I also learned a lot about working in a team and managing a small group of people.
You can find this project on GitHub!