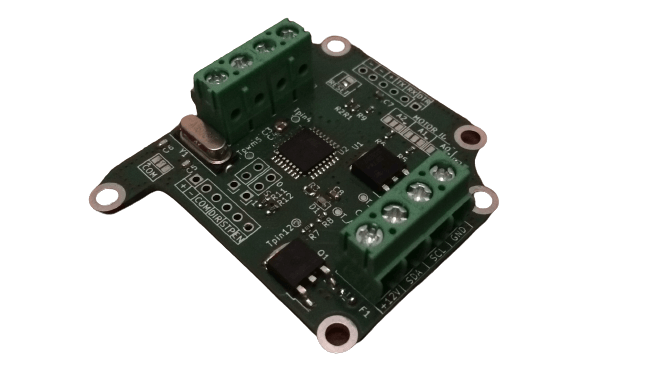
Boxing Robot Stepper Controller
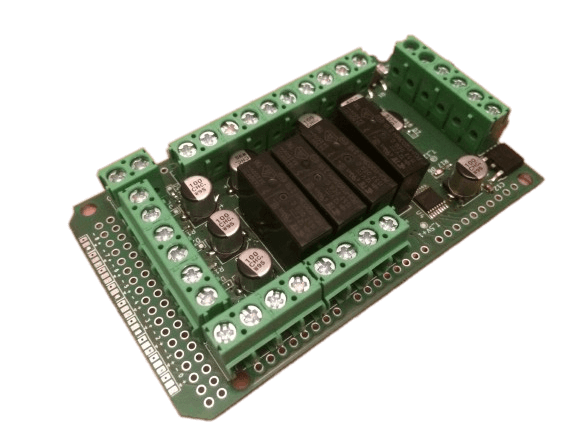
Boxing Robot Main Controller
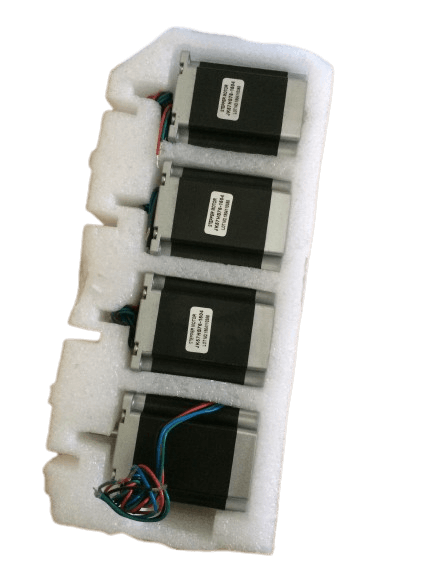
Boxing Robot Motors
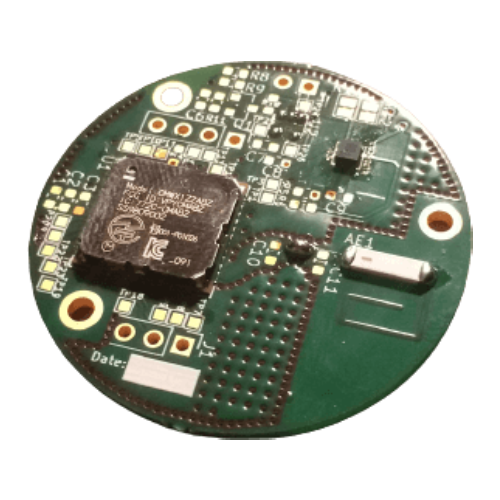
Parking sensor Populated
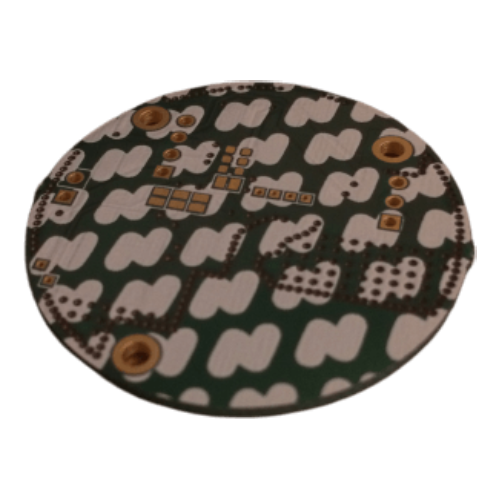
Parking sensor back
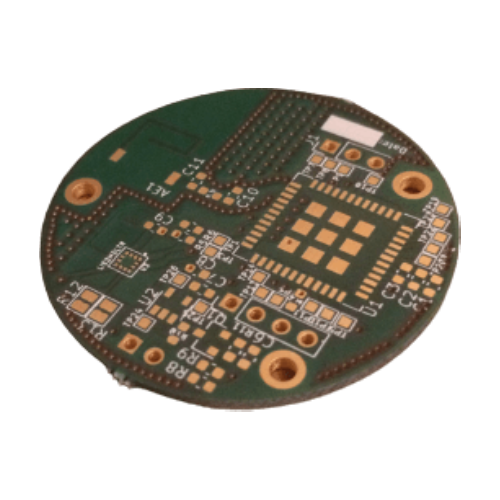
Parking sensor front
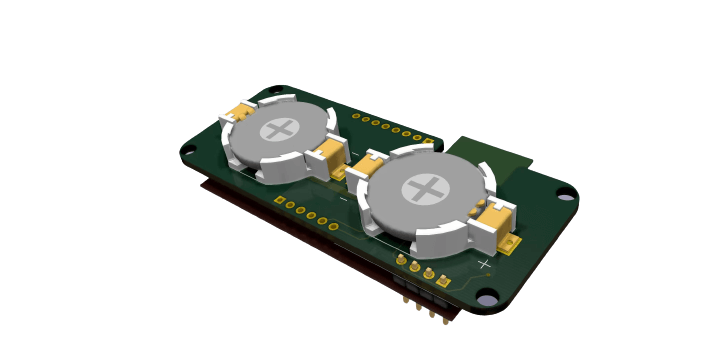
Retail display front
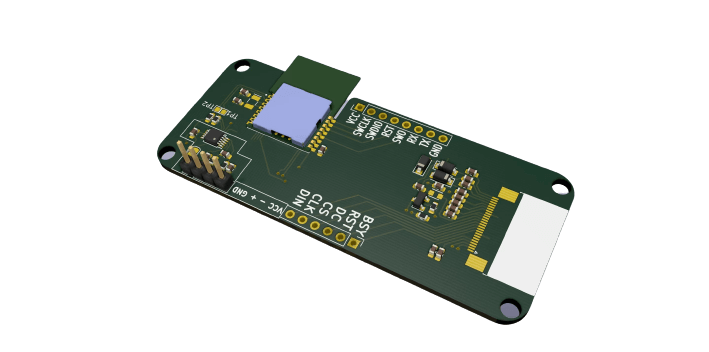
Retail display back

Retail display in casing
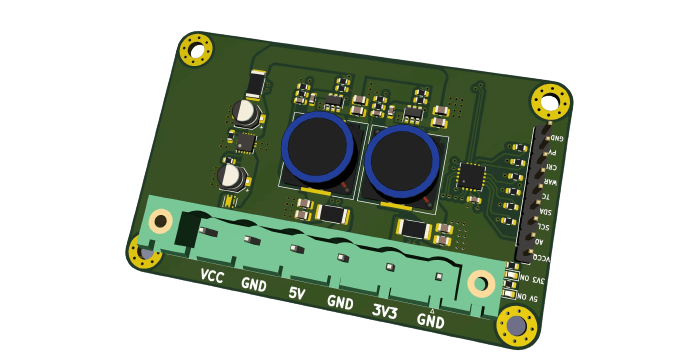
Power supply
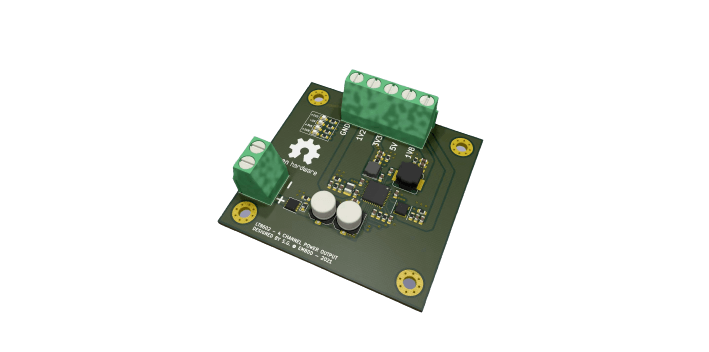
Power supply
Athletic device
Overview
This section groups all smaller projects and other software projects that I have done.Boxing Robot
The boxing robot was an exciting project for a UK-based client, though the robot itself cannot be shown due to confidentiality. My role in the project was to design the hardware and software necessary to control the robot's 4 stepper motors.The first board was mounted alongside an encoder and stepper driver onto the motor, serving as an interface to control each stepper. It utilized an ATMEGA328P microcontroller with connectors to the main board, encoder, and driver, and included PID control for precise positioning of the stepper motors. The main board sent commands to the first board on where the stepper motor should go, which was then used to calculate the rotation angle of the stepper motor with PID controlling.
The second board was the master board, utilizing an Arduino MEGA as a shield, which communicated with the motors and controlled various actuators and high-power LEDs. Additionally, it was equipped with accelerometers to measure punches thrown at the robot. It was also connected to a PC, which ran a control panel software designed to send specific boxing combinations to the robot.
The hardware was designed using KiCAD, and the software for the PC was written with Qt.